光伏组件的电池片串焊生产线上,工业机器人以微米级精度完成电池片焊接,设备的稳定性直接关系到光伏组件的发电效率和使用寿命。由于光伏行业生产节奏快,设备一旦停机损失巨大。智小杭推出 “极速修复” 售后服务,承诺接到故障报修后,1 小时内提供远程技术指导,若无法解决,工程师 8 小时内到达现场维修。在某光伏企业的生产过程中,串焊机器人的焊接头出现异常,导致焊接不良率大幅上升。智小杭工程师通过远程指导初步判断故障原因后,迅速携带备用焊接头赶赴现场, 用 2 小时就完成了焊接头的更换和调试,使生产线恢复正常。同时,为企业提供设备升级服务,根据光伏技术发展,对机器人焊接工艺、视觉识别系统进行优化,如引入新型的激光焊接技术,提高焊接效率和质量,助力企业提升产品竞争力,降低生产成本。定期检查机械臂的控制柜散热系统,防止因过热损坏电子元件,浙江展杭维护检修,保障控制柜稳定。湖州市4轴减速机机器人维修常见故障

玻璃制品上下料生产线的搬运机器人,需要在易碎品的搬运过程中保持极高的稳定性和精度,其真空吸附系统和减震机构至关重要。某玻璃厂的搬运机器人运行 2 年后,出现吸附不牢、振动过大的问题。智小航维护人员对真空吸附系统进行多方面检测,更换磨损的真空吸盘和密封件,对真空泵进行性能测试和维护。对减震机构进行调整和加固,优化机器人的运动参数,降低搬运过程中的振动。经过维护,机器人使用寿命从 4 年延长至 6 年,玻璃破损率降低 80%。嘉兴市SMB电池机器人维修安川机器人示教器按键维修,恢复操作功能。

注塑机上下料生产线的工业机器人,在高温注塑件的抓取过程中,其耐高温抓取机构和隔热部件容易损坏。某塑料制品厂的上下料机器人运行 18 个月后,出现抓取机构变形、隔热效果下降的情况。智小航维护团队采用耐高温陶瓷材料对抓取机构进行强化,更换老化的隔热棉和隔热板。对机器人的运动轨迹进行优化,减少高温部件的接触时间。同时,建立温度监测系统,实时监控抓取机构的温度变化。经过维护,机器人使用寿命从 3 年延长至 5 年,抓取成功率提高至 99.5%。
在家电制造的注塑车间,工业机器人能高效完成塑料件成型任务。随着生产规模扩大,设备使用频率增加,注塑机机械手臂的运动精度、模具定位准确性可能出现偏差,影响产品质量和生产效率。智小杭售后团队提供设备精度恢复服务,通过专业仪器检测机械手臂各关节参数,进行 精确调校;针对模具磨损问题,提供模具修复与保养服务。例如,某家电企业的注塑生产线因机械手臂精度下降,导致产品尺寸偏差,智小杭工程师通过对机械手臂的关节角度、伺服电机参数等进行多方面检测和调整,并对模具进行表面抛光和尺寸修复,使产品合格率从 85% 提升到 98%。此外,智小杭还为企业定制设备维护计划,按周期进行多方面保养,同时提供设备升级服务,根据行业发展趋势,对注塑工艺参数、控制系统进行优化,帮助企业降低生产成本,提高生产效率。库卡焊接机器人系统集成,提升产线自动化水平。
【工业智造厂家】浙江展杭为您带来ABB焊接机器人全系解决方案!🔥作为ABB代理商,我们推荐这三款爆款机型:1️⃣IRB4600战神版搭载TrueView3D视觉系统(200Hz刷新率)焊缝自动追踪精度±比较高焊接速度600mm/s(相当于1秒焊完一部手机长度)汽车行业实测:良品率↑2️⃣柔性焊装天团6台联机组成智能产线支持8款车型无缝切换日产1200个汽车底盘比人工团队节省15个岗位3️⃣航天**款钛合金激光焊熔±💡为什么选择我们?✔️浙江省***ABB焊接机器人五星服务商✔️提供焊接工艺调试✔️24小时应急响应✔️赠送价值5万的焊接培训课程【真实案例】拓普汽车宁波工厂采用我们的方案后:✓焊接效率提升43%✓年节省人工成本680万✓产品不良率下降至📞现在咨询即送《智能焊接白皮书》+工厂实地考察名额!检查机械臂的传感器灵敏度,避免因信号误判影响生产,浙江展杭快速检修,恢复传感器正常功能。宁波市4轴电机机器人维修
库卡机器人碰撞检测调试,预防设备损伤。湖州市4轴减速机机器人维修常见故障
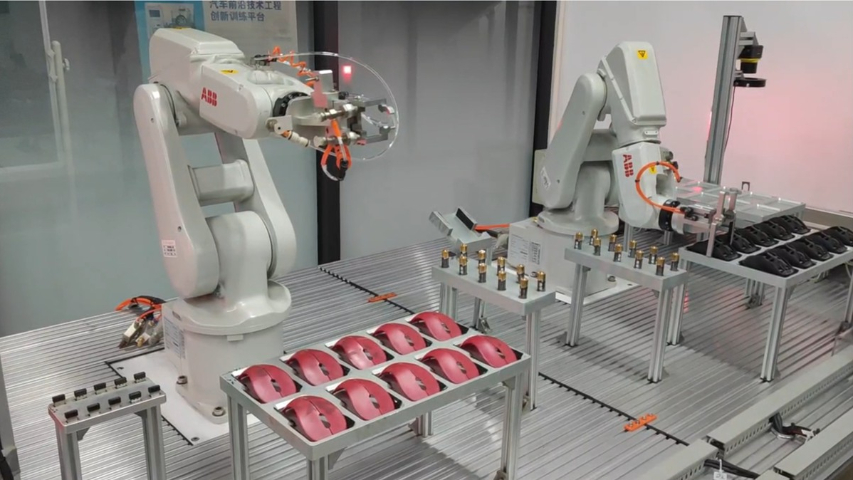
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。湖州市4轴减速机机器人维修常见故障
厨具打磨生产线,机器人需对不锈钢厨具进行抛光、拉丝等处理,打磨过程中产生的高温和金属碎屑对设备造成较...
【详情】光伏组件的电池片串焊生产线上,工业机器人以微米级精度完成电池片焊接,设备的稳定性直接关系到光伏组件的...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台...
【详情】卫浴陶瓷打磨生产线,机器人在潮湿、酸碱环境下对陶瓷制品进行打磨、修边,机械部件易被腐蚀,电气系统易受...
【详情】机器人在汽车滤清器生产的组装线中可以使用到,组装机器人需要精确安装滤芯、端盖等部件,机械手指和传动皮...
【详情】六轴工业机器人在汽车焊装车间的技术集成与应用在现代化汽车焊装车间中,六轴工业机器人通过高...
【详情】卫浴陶瓷的釉面喷涂工序,工业机器人 精确控制釉料喷涂厚度与均匀度,直接影响产品的外观质量和市场竞争力...
【详情】电子元器件打磨生产线,小型精密打磨机器人对芯片、电路板等进行精细加工,对定位精度和稳定性要求极高。某...
【详情】机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉...
【详情】监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,...
【详情】机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉...
【详情】