- 品牌
- 南京尤尼泰
- 型号
- M210
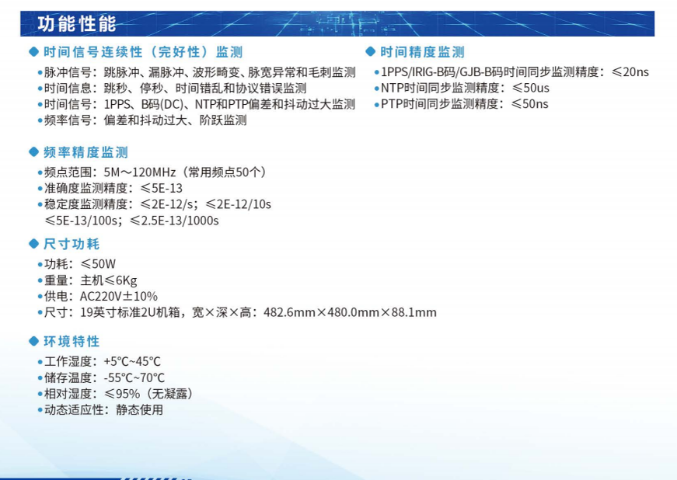
- 尺寸
- 482.6mm x 480.0mm x 88.1mm
- 重量
- ≤6Kg
- 产地
- 南京
- 可售卖地
- 全国
- 是否定制
- 是
时间频率监测设备的环境适应性评估时间频率监测设备在多种环境中运行,为确保其准确性和可靠性,必须对其环境适应性进行综合评估。评估主要涵盖温度和湿度等关键因素。温度对时间频率监测设备的影响不容忽视。高温环境可能导致设备内部元件性能下降,从而影响频率稳定性。而低温环境则可能影响设备的启动和运行。因此,需要对设备进行高温试验、低温试验以及温度循环试验。这些试验旨在模拟极端温度环境,评估设备在这些条件下的性能稳定性。湿度也是影响设备性能的重要因素。恒定湿热和交变湿热试验分别模拟设备在高温高湿和湿度循环变化环境中的情况。这些试验有助于评估设备的耐腐蚀性、绝缘性能和防潮性能。评估方法包括将设备置于特定的温度和湿度条件下,并监测其性能变化。通过设定多个温度、湿度校准点,利用传感器在设备工作空间的不同层面进行布放,收集数据并进行分析。关键的性能指标包括温度偏差、温度均匀度、温度波动度以及相对湿度的波动度和均匀度。为了确保评估的准确性和可靠性,建议采用标准化的校准和测试方法,并遵循相关的行业规范。此外,使用高精度的校准设备和专业的校准服务也是至关重要的。 灵活性:可根据客户需求定制输出信号和供电方式。河北M210时间频率监测设备
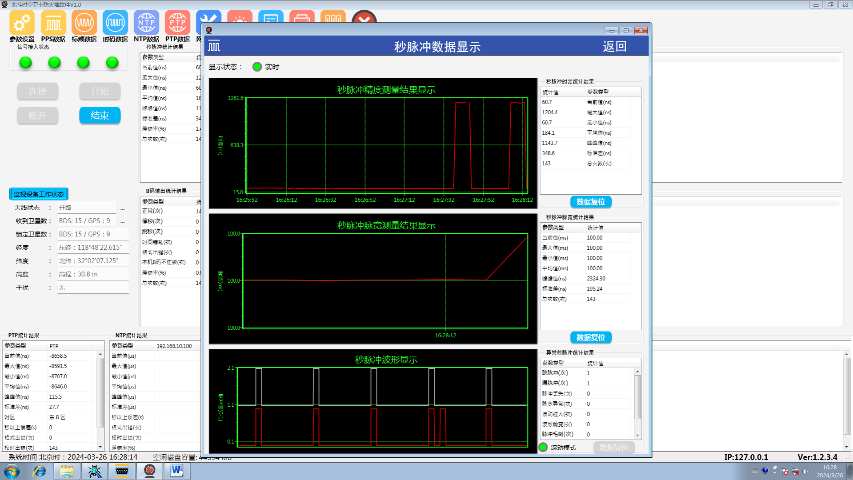
时间频率监测中的相位噪声产生机制在时间频率监测中,相位噪声是一个重要的参数,它描述了信号频率中相位差的随机变化,这种变化会导致频率的不稳定性。相位噪声的产生有多种原因,主要可以归结为以下几点:首先,电子器件的非线性工作状态是一个关键因素。当电子器件如放大器、非线性传感器等处于非线性状态时,会引起频率混叠,进而增加相位噪声。这种非线性可能源于工作点的偏差、杂散回路等。其次,温度的变化也会影响电子器件的参数,从而导致相位噪声的产生。例如,晶体振荡器(OCXO)的共振频率会随着温度的变化而变化,这种变化会转化为相位噪声。此外,时钟信号的漂移也是相位噪声的一个重要来源。时钟漂移是指时钟信号的频率不稳定性,可能由于时基器件的稳定性差、温度变化、器件老化等原因导致。时钟漂移会引起相位噪声的产生,影响信号的传输性能。相位噪声的影响是多方面的。在通信系统中,它会导致信号幅度和相位的抖动,降低信号的传输性能。同时,相位噪声还会引起信号谱的不规则变化,导致谱勾股耦合,增加接收机对周围环境中其他信号的干扰。此外,相位噪声还会引起符号定时误差和频率漂移,进一步降低系统的传输可靠性。 河北M210时间频率监测设备可靠性:支持驯服功能,即使在GPS/北斗信号失锁时,也能依靠恒温晶振保持时间频率信号的稳定输出。

未来时间频率监测技术的发展趋势时间频率是现代信息技术的基石,其精度和稳定性直接关系到通信、电力、交通等领域的运行效率和安全性。随着科学技术的不断进步,未来时间频率监测技术将呈现以下几大发展趋势:高精度与稳定性:未来时间频率监测技术将更加注重高精度和稳定性。以原子钟为首的高精密时频产品将不断升级,以满足航空航天、现代信息化领域对时间精度的苛刻要求。智能化与自动化:随着人工智能和物联网技术的快速发展,时间频率监测技术将逐渐实现智能化和自动化。通过引入智能算法和传感器技术,实现对时间频率信号的实时监测和自动校准,提高监测效率和准确性。多源融合与综合监测:未来时间频率监测技术将实现多源融合与综合监测。通过整合卫星导航、无线授时、网络授时等多种授时手段,构建更加完善的时间频率监测体系,实现对时间频率信号的多方位、多层次监测。国产化与自主可控:鉴于时间频率技术在社会安全中的重要作用,未来我国将加快推进时间频率监测技术的国产化和自主可控。通过加大研发投入和政策支持,推动国内企业在时间频率监测技术领域的突破和创新。
卫星通信中时间频率监测的关键作用卫星通信作为现代通信技术的重要组成部分,其稳定性和准确性对于各种应用至关重要。而在这一领域中,时间频率监测发挥着不可或缺的关键作用。时间频率监测为卫星通信提供了精确的时间基准。在卫星通信系统中,各个组成部分需要保持高度的时间同步,以确保通信信号的稳定性和可靠性。时间频率监测通过高精度的原子钟等设备,为系统提供稳定的时间基准,使得各个部分能够协调一致地工作,从而提高通信的效率和准确性。时间频率监测有助于消除多普勒频移的影响。卫星在高速运动时,其发射的信号会受到多普勒效应的影响,导致信号频率发生变化。时间频率监测技术能够测量和补偿这种频移,从而确保接收端能够准确解调卫星信号中的信息,提高通信数据的可靠性。此外,时间频率监测在卫星通信中还具有测距和定位的功能。通过精确测量卫星信号到达地面站的时间,可以计算出卫星与地面站之间的距离,进而确定卫星的位置。这对于卫星导航和定位应用来说至关重要,为各种需要高精度位置信息的服务提供了可靠保障。时间频率监测在卫星通信中扮演着至关重要的角色。它不仅为系统提供精确的时间基准,消除多普勒频移的影响,还具有测距和定位的功能。 增强系统可靠性:确保时间同步的准确性,提高系统整体可靠性。
时间频率监测设备在不同频段下选择时间频率监测设备在多个领域都发挥着至关重要的作用,如通信、电力、交通等。在选择这些设备时,频段的选择至关重要,因为它直接影响设备的性能和应用效果。频段的选择首先要考虑的是设备的应用场景。例如,在交通雷达领域,24GHz和77GHz是两个主要的频段。24GHz的雷达波长较长,因此其检测距离相对较远,适用于需要远距离监测的场景。而77GHz的雷达则具有更高的频率和带宽,理论上具有更高的距离分辨力和测速分辨力,但在实际应用中,这些优势可能会受到硬件成本和系统复杂度的限制。此外,频段的选择还需考虑设备的抗干扰能力。随着车载雷达的普及,交通雷达可能会受到来自其他雷达的干扰。77GHz频段的干扰问题可能会越来越严重,因为越来越多的车载雷达开始采用这一频段。因此,在选择时间频率监测设备时,需要考虑设备的抗干扰能力,以确保其能在复杂环境中稳定工作。对于时间频率监测设备本身,如SYN5104型时间频率综合测试仪,它使用GPS或北斗信号进行时间同步,具有高精度和高可靠性。这类设备在选择频段时,主要关注的是信号的稳定性和可用性,以确保时间同步的精确性。 相位一致性:1PPS与10MHz信号相位一致,确保信号的同步性。江西高精度时间频率监测防火墙
频率稳定性:提供稳定的频率输出,减少系统误差。河北M210时间频率监测设备
时间频率监视设备与自动驾驶汽车的时间同步依赖自动驾驶汽车的复杂系统依赖于多种传感器和设备的精确协作,其中,时间频率监视设备与精确的时间同步发挥着至关重要的作用。在自动驾驶汽车的运作中,各个传感器如激光雷达、毫米波雷达、摄像头等,都需要从采集数据、处理到发送至域控制器内部,这一过程存在延时,且延时的时长不稳定。为了提高自动驾驶的传感器融合、决策规划和融合定位等性能,自动驾驶高级域控制器HPC与其关联的传感器均需要做时间同步。时间同步的实现依赖于精确的时钟源,如GNSS导航卫星内置的高精度原子钟。GNSS接收机通过解算导航卫星信号,可以获得超高精度的时钟信号,为自动驾驶系统提供基准时钟源。基于网络的高精度时间同步协议PTP(PrecisionTimeProtocol,1588V2)和gPTP(generalizedPrecisionTimeProtocol),同步精度可以达到亚微秒级,进一步提高了自动驾驶系统的时间同步精度。时间同步对于自动驾驶汽车至关重要。例如,在感知融合阶段,如果没有时间同步,不同传感器采集的数据将无法准确融合,可能导致决策单元误判,从而引发事故。此外,各传感器的采样频率也不一致,没有准确的时间同步,就无法判断各传感器在哪一帧进行融合。 河北M210时间频率监测设备
- 上海M210时间频率监测功能 2025-07-15
- 青海操作便捷时间频率监测设备 2025-07-14
- 广西高精度时间频率监测设备 2025-07-14
- 南京高效时间频率监测装置 2025-07-13
- 河南系统时间频率监测软件 2025-07-08
- 吉林M210时间频率监测功能 2025-07-03
- 辽宁监测准确时间频率监测装置 2025-07-02
- 深圳操作便捷时间频率监测防火墙 2025-06-30
- 山东高效时间频率监测功能 2025-06-28
- 重庆高精度时间频率监测设备 2025-06-26
- 杭州高精度时间频率监测性能 2025-06-25
- 上海操作便捷时间频率监测性能 2025-06-24


