- 品牌
- 来拓
- 型号
- LT
石油开采与炼化行业存在诸多安全风险,工控设备通过一系列措施保障其生产过程的安全。在石油开采的钻井平台上,工控设备对钻井过程中的压力、温度、液位等参数进行实时监测和控制。例如,当钻井液的压力出现异常波动时,工控系统会立即调整泥浆泵的工作参数,确保井壁的稳定,防止井喷事故的发生。在石油炼化过程中,DCS对炼油装置中的各种化学反应进行精确控制,严格控制反应温度、压力和物料流量,避免因反应失控导致的炸破或火灾事故。同时,工控设备配备了多重安全联锁装置,如当某个设备出现故障或工艺参数超出安全范围时,安全联锁会自动启动,停止相关设备的运行,并将危险区域隔离。此外,通过网络安全技术,工控设备防止外部网站攻击和恶意篡改数据,保障石油开采与炼化过程中的信息安全,确保人员生命安全和企业财产安全。智能工控设备,学习优化控制策略,提升工业效益明显。虎丘区生产线工控设备方案
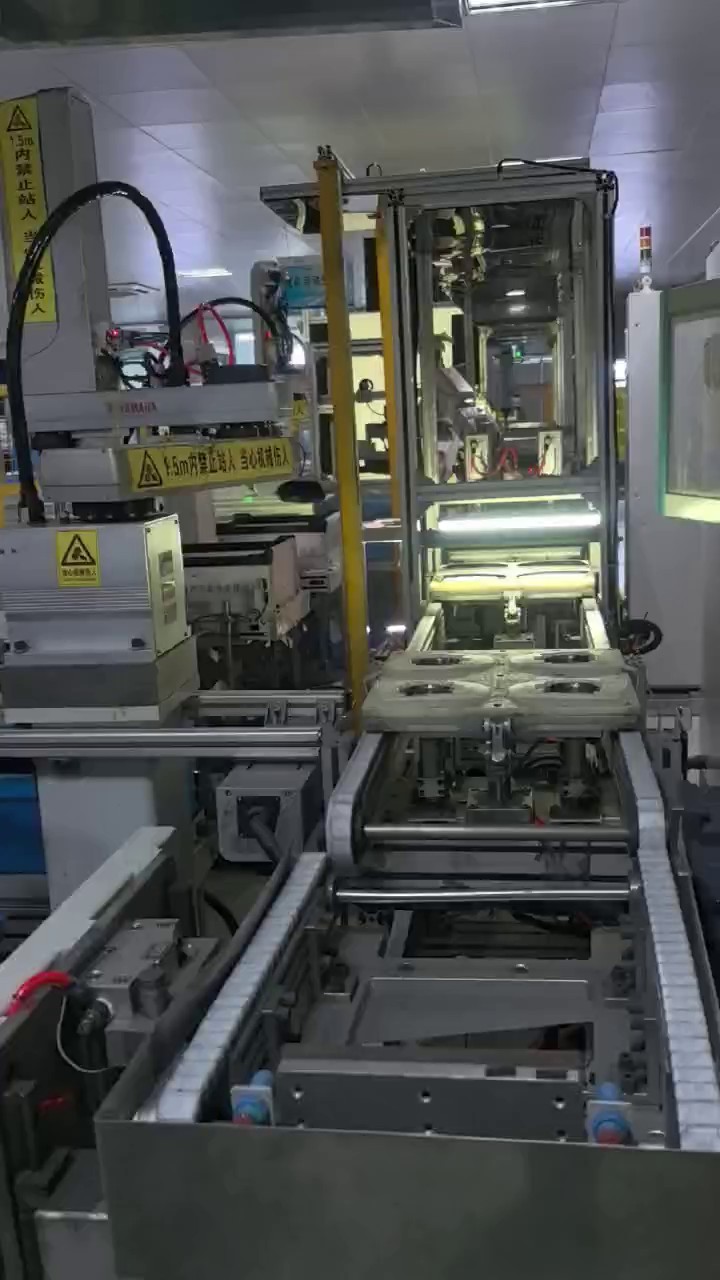
工控设备
随着消费者对家具个性化需求的增加,家具制造行业需要具备柔性生产能力,工控设备在家具制造自动化生产线中满足了这一需求。在板式家具生产线上,数控加工中心在工控设备的控制下,可以根据不同的家具设计图纸,快速调整刀具路径和加工参数。例如,对于不同尺寸和形状的板材,工控设备能够自动生成相应的切割、钻孔、开槽等加工指令,实现板材的个性化加工。自动化封边机在工控设备的指挥下,根据板材的厚度和边缘形状,精确调整封边带的宽度、涂胶量和加热温度,保证封边质量。同时,通过自动化物流系统,在工控设备的调度下,将加工好的零部件准确地运输到装配区域,实现家具的快速组装。工控设备的应用使家具制造企业能够在同一条生产线上生产多种款式的家具,提高了企业对市场变化的响应速度和市场竞争力。吴中区逆变器工控设备原理工控设备的网络连接,促进工业设备间协同合作无间配合。

流量控制方面,工控设备通过安装在管道上的流量计实时监测流体的流量,并与预设的流量值进行比较。根据流量偏差,采用流量控制阀,如调节阀或节流阀,通过改变阀门的开度来调节流体的阻力,从而控制流量。例如,在原油输送管道中,当需要增加流量时,工控设备控制调节阀增大开度,减小管道阻力,使原油能够更快地流动。压力控制则通过压力传感器监测管道内的压力变化,当压力偏离设定范围时,工控设备调节泵的转速或启停其他增压或减压设备。例如,在高压液体输送管道中,如果压力过高,工控设备启动减压装置或降低泵的转速,防止管道因压力过大而发生泄漏或破裂;如果压力过低,则启动增压泵或调整泵的工作参数,确保流体能够顺利输送到目的地,保障石油化工管道输送系统的稳定、安全运行。
工控设备在工业生产中的节能环保方面发挥着积极作用。在能源生产领域,如火力发电,工控设备通过对锅炉燃烧过程的精确控制,优化燃料与空气的配比,提高燃烧效率,减少能源浪费和污染物排放。在工业制造过程中,工控设备可以根据生产任务合理安排设备的启停和运行功率,避免设备空转和过度消耗能源。例如,在空调制造车间,工控系统根据车间内的实际温度、人员数量等因素,动态调整空调设备的制冷量,既保证了工人的舒适工作环境,又降低了能源消耗。此外,工控设备还可用于工业废水、废气处理系统的控制,提高处理效率,减少环境污染,助力企业实现绿色可持续发展。工控设备的海量存储能力,记录工业生产全流程数据。

由于工控设备在工业生产中承担着关键任务,其可靠性要求极高。一旦工控设备出现故障,可能导致整个生产流程中断,造成巨大的经济损失。因此,工控设备在设计和制造过程中,采用了冗余技术、容错技术等多种可靠性保障措施。例如,一些重要的控制系统采用双机热备份模式,当主设备出现故障时,备份设备能够立即接管工作,确保系统不间断运行。同时,在设备选型时,也注重选择质量可靠、经过市场长期检验的产品,并定期对设备进行维护保养和性能检测,及时发现并排除潜在故障隐患,保障工业生产的连续性和稳定性。工控设备的虚拟调试,降低工业项目开发成本与风险损失。武进区工控设备种类
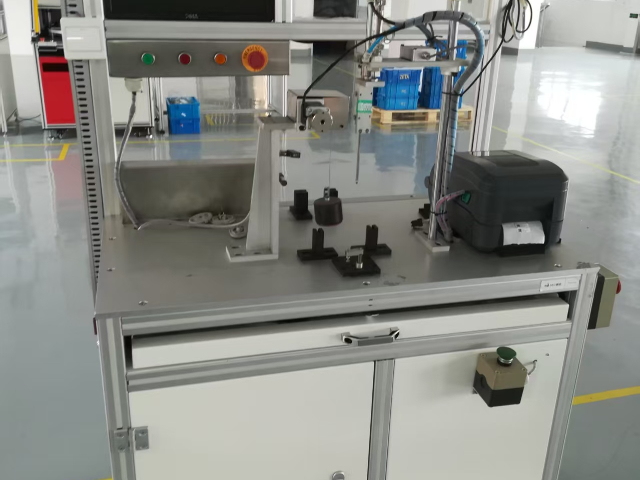
灵活的工控设备,适应多品种小批量生产模式切换自如。虎丘区生产线工控设备方案
轨道交通的安全运营依赖于可靠的信号系统,工控设备在其中运用了一系列关键技术并具备高度可靠性。在列车自动控制系统(ATC)中,工控设备采用了先进的通信技术、计算机技术和控制技术。例如,通过无线通信网络,实现列车与地面控制中心之间的实时信息交互,地面控制中心根据列车的位置、速度和运行计划,利用工控设备向列车发送控制指令,如加速、减速、停车等。同时,为了确保信号系统的可靠性,工控设备采用了冗余设计。在关键设备和线路上,设置了备份系统,当主系统出现故障时,备份系统能够迅速切换并接管工作,保证信号系统不间断运行。此外,严格的质量检测和认证体系确保了工控设备在轨道交通信号系统中的高可靠性,有效防止列车追尾、相撞等事故的发生,保障了广大乘客的生命安全和轨道交通的高效运行。虎丘区生产线工控设备方案

工业机器人在执行任务时,其轨迹规划由工控设备中的特定算法实现。轨迹规划算法的关键是根据机器人的任务要求和工作环境,确定机器人末端执行器在空间中的运动路径和速度。例如,在机器人弧焊任务中,工控设备首先根据焊接工件的形状、焊缝的位置和要求,将焊缝分解为多个离散的路径点。然后,采用插值算法,如直线插值、圆弧插值或样条曲线插值等,在这些路径点之间生成连续平滑的运动轨迹。同时,考虑到机器人的运动学约束,如关节的运动范围、速度限制和加速度限制等,算法会对生成的轨迹进行优化调整,确保机器人能够以合理的姿态和速度沿着轨迹运动,避免出现关节超限或运动不稳定的情况。此外,在轨迹规划过程中,还会考虑到障碍物的避让,...
- 江阴工控设备原理 2025-07-15
- 高新区测试工控设备 2025-07-15
- 无锡工控设备原理 2025-07-15
- 太仓汽车零部件工控设备方案 2025-07-15
- 虎丘区工控设备公司 2025-07-15
- 常熟西门子工控设备 2025-07-15
- 苏州工控设备种类 2025-07-14
- 上海逆变器工控设备 2025-07-14
- 无锡测试工控设备交期 2025-07-14
- 相城区组装工控设备厂家 2025-07-14


- 常熟组装工控设备 2025-07-13
- 工业园区汽车零部件工控设备 2025-07-13
- 常州工控设备店 2025-07-13
- 工业园区工控设备有限公司 2025-07-13
- 浙江工控设备方案 2025-07-13
- 虎丘区组装工控设备厂家 2025-07-13





- 江阴工控设备原理 07-15
- 高新区测试工控设备 07-15
- 无锡工控设备原理 07-15
- 太仓汽车零部件工控设备方案 07-15
- 虎丘区工控设备公司 07-15
- 常熟西门子工控设备 07-15
- 宜兴汽车零部件实验台价格 07-14
- 吴中区组装实验台厂家 07-14
- 苏州工控设备种类 07-14
- 上海逆变器工控设备 07-14