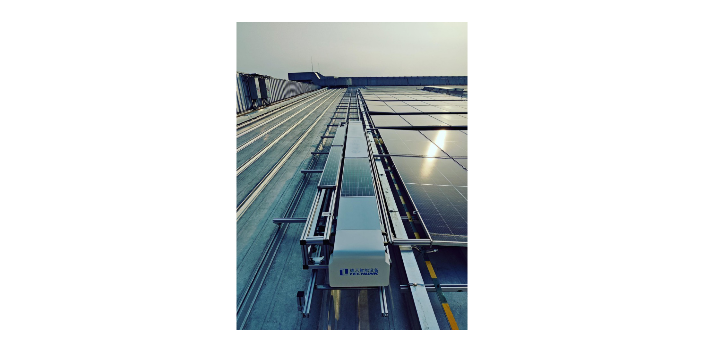
智能光伏清洁机器人的优势及特点:行走驱动装置采用模块化设计,由大功率直流电机驱动,具有较强的地形适应性。适用于各种规格的光伏组件;光伏组件安装平整度低;内置大容量低温动力锂电池,完整的充电控制电路和智能电源管理程序,确保各种终端的正常运行;自带光伏发电系统和清洁装置,安装方便,射程远,可清洁2000米光伏组件;IP65防水结构设计,耐高低温、耐雨、耐酸雾;技术和机械结构设计,能承受12级强风;自供电,自储能,无外部能源无人值守,智能控制,无水清洁,无水资源!大部分电站环境恶劣,缺水,取水困难,这个机器人不需要用水。辽宁光伏清扫机器人

国自机器人获评首台(套)项目一览:2014:变电站KYN开关柜智能操控机器人2015:基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人;碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁.甘肃电站清洗机器人报价清洁的光伏组件不仅能提高发电量,降本增效,还能延长设备的使用寿命,带来更长久的价值!

搜集资料进行光伏板清扫机器人发展前景预测必须占有充分的资料。有了充分的资料,才能为光伏板清扫机器人发展前景预测提供进行分析、判断的可靠依据。在光伏板清扫机器人发展前景预测计划的指导下,调查和搜集预测有关资料是进行光伏板清扫机器人发展前景预测的重要一环,也是预测的基础性工作。3、选择方法根据预测的目标以及各种预测方法的适用条件,选择出合适的预测方法。有时可以运用多种预测方法来预测同一目标。预测方法的选用是否恰当,将直接影响到预测的精确性和可靠性。运用光伏板清扫机器人发展前景预测方法的**是建立描述、概括研究对象特征和变化规律的模型,根据模型进行计算或者处理,即可得到预测结果。
1.全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作。2.行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图。3.超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区。4.零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件。5.充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫。6.组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业;7.水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;8.多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。能够实时监测电池板的清洁状态,并通过云平台进行数据分析,为电站管理提供科学依据。

全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作;行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图;超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区;零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件。充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫;组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业;水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃。多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。能够实时监测电池板的清洁状态,并通过云平台进行数据分析,为电站管理提供科学依据。广西智能清洗机器人报价表
大部分电站环境恶劣,缺水,取水困难,这个机器人不需要用水.辽宁光伏清扫机器人
1.全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作;2.行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图;3.超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区;4.零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件;5.充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫;6.组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业。7.水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;8.多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。辽宁光伏清扫机器人