全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作。行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图;超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区;零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件。充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫;组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业;水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。大部分电站环境恶劣,缺水,取水困难,这个机器人不需要用水.河南光伏智能清扫机器人

关于数据传输:光伏清扫机器人系统配2个数据传输模块,用于机器人本体、摆渡车、服务器之间的传输,本体安装物联网卡用于云平台及本地服务器的网络通信。关于机器人数量:光伏清扫机器人应用在电站中,根据方阵的布局,设计停机架、桥接、摆渡车等辅助性结构,并确定机器人清扫范围和机器人数量。关于控制系统:配套光伏清扫机器人管理系统,提供云端部署和管理使用权限;支持提供管理系统项目本地内网服务器部署;提供光伏清扫机器人管理系统软件接口文件,可支持与其他平台的数据对接。
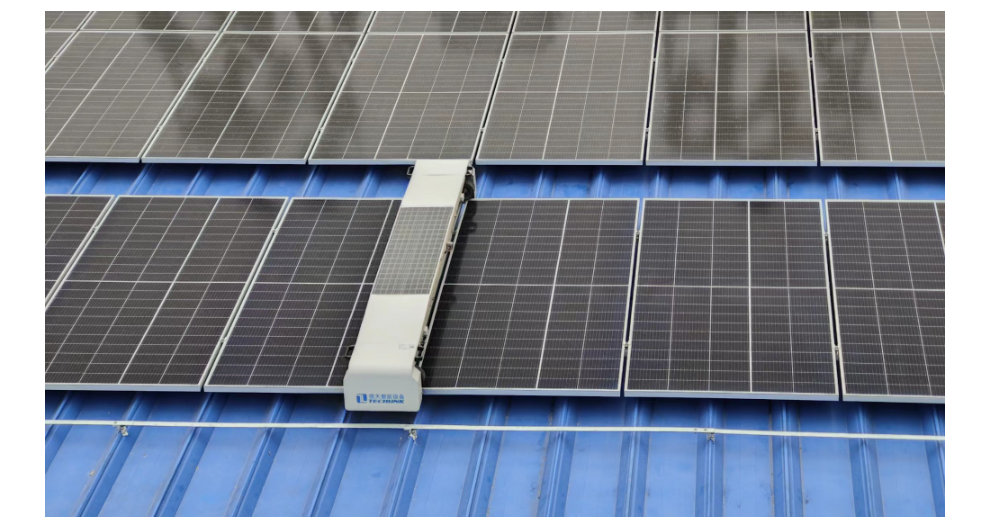
光伏清扫机器人光伏组件的框架用作轨道,无需铺设轨道,成本低,便于现场安装和施工。

定性定量另一种分类发展前景预测的分类方法般可以分为定性预测和定量预测两大类。对于企业营销管理人员来说,应该了解和掌握的企业预测方法主要有:(1)定性预测法定性预测法也称为直观判断法,是光伏板清扫机器人发展前景预测中经常使用的方法。定性预测主要依靠预测人员所掌握的信息、经验和综合判断能力,预测市场未来的状况和发展趋势。这类预测方法简单易行,特别适用于那些难以获取***的资料进行统计分析的问题。因此,定性预测方法在光伏板清扫机器人发展前景预测中得到***的应用。定性预测方法又包括:会议法,德尔菲法,销售人员意见汇集法,顾客需求意向调查法。
全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作。行业**AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图;超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区;零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件;充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫;组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业;水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫。

全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作。行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图。超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区。零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件。充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫;组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业;水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏了,拒绝擦伤组件。河南智能清洗机器人品牌
水洗干刷灵活选择浮尘,鸟粪、铁锈顽渍轻松清洁,工作环境温度-20℃~50℃。河南光伏智能清扫机器人
1.全自动智能清扫,无人值守,远程控制,云端Web/App多通道一键操作。2.行业AI视觉,毫米级高精导航定位,比较好路径规划,智能生成导航地图。3.超轻量化机身设计,组件2万次清洁零损伤,柔韧机构设计,组件适应性好,清扫零盲区。4.零摩擦转向,主动姿态纠偏,智能越障,适应复杂环境,拒绝跑偏,拒绝擦伤组件。5.充电坞自主无线充电,无人值守,省心省力,自主记忆清扫路径,低电量自返回充电,断点续扫。6.组件倾斜角度干刷0~15°水洗0~10°,全身C4防腐+IP65设计,8级大风可作业。7.水洗干刷灵活选择浮尘,鸟粪,铁锈,顽渍轻松清洁,工作环境温度-20℃~50℃;8.多组传感器融合,三重防跌落设计,拒绝跌落安全可靠,无复杂施工,部署高效。河南光伏智能清扫机器人