做好光伏板清扫机器人发展前景预测,需把握预测的四个基本要素:1、信息。信息是客观事物特性和变化的表征和反映,存在于各类载体,是光伏板清扫机器人预测的主要工作对象、工作基础和成果反映。2、方法。方法是指在预测的过程中进行质和量的分析时所采用的各种手段。预测的方法按照不同的标准可以分成不同的类别。按照光伏板清扫机器人预测结果属性可以分为定性预测和定量预测,按照预测时间长短的不同,可以分为长期预测、中期预测和短期预测。按照方法本身,更可以分成众多的类别,**基本的是模型预测和非模型预测。
可以清洁光伏板上表面的灰尘、污垢、鸟粪、沙粒等污染物,提高光伏板的发电效率。安徽电站清洗机器人

国自机器人获评首台(套)项目一览,2014年变电站KYN开关柜智能操控机器人;2015年基于多驱动单元同步控制的重载搬运机器人;2016年面向太阳能光热发电场的镜面清洗机器人;2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!山西电站清扫机器人品牌光伏有三种清洁方式:人工清洁,水车清洁和机器人清洁。
国自机器人获评首台(套)项目一览:2014,变电站KYN开关柜智能操控机器人 2015,基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!
国自机器人获评首台(套)项目一览:2014:变电站KYN开关柜智能操控机器人;2015:基于多驱动单元同步控制的重载搬运机器人;2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁.大部分电站环境恶劣,缺水,取水困难,这个机器人不需要用水.

光伏板清扫机器人发展前景预测的方法很多,主要有以下几种:1、时间序列在光伏板清扫机器人发展前景预测中,经常遇到一系列依时间变化的经济指标值,如光伏板清扫机器人企业产品按年(季)的销售额、供给量等,这些按时间先后排列起来的一组数据称为时间序列。依时间序列进行预测的方法称为时间序列预测。2、回归(1)“回归”的含义。回归是指用于分析、研究一个变量(因变量)与一个或几个其它变量(自变量)之间的依存关系,其目的在于根据一组已知的自变量数据值,来估计或预测因变量的总体均值。在经济预测中,人们把预测对象(经济指标)作为因变量,把那些与预测对象密切相关的影响因素作为自变量。根据二者的历史和统计资料,建立回归模型,经过统计检验后用于预测。回归预测有一个自变量的一元回归预测和多个自变量的多元回归预测,这里*讨论一元线性回归预测法。
卫生安全方面,机器人的运行不需要人工干预,避免了人工清洁过程中可能产生的伤害和污染风险。陕西光伏扫地机器人
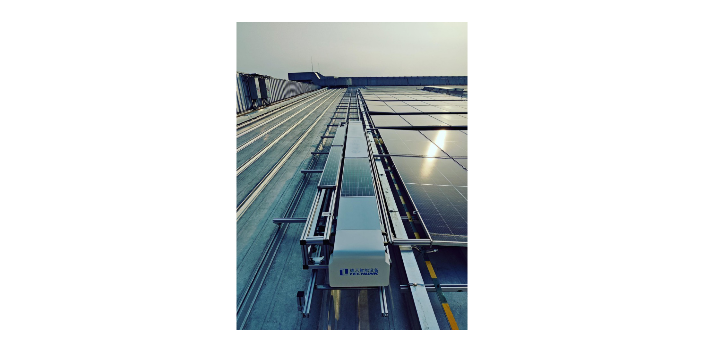
智能清扫机器人的小巧灵活的设计,能够适应不同规格和安装环境的光伏面板。安徽电站清洗机器人
国自机器人获评首台(套)项目一览:2014,变电站KYN开关柜智能操控机器人 2015:基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!安徽电站清洗机器人




