当码盘转动时,它的输出信号是相位差为90°的A相和B相脉冲信号以及只有一条透光狭缝的第三码道所产生的脉冲信号(它作为码盘的基准位置,给计数系统提供一个初始的零位信号)。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。当码盘正转时,A道脉冲波形比B道超前π/2,而反转时,A道脉冲比B道滞后π/2。是一实际电路,用A道整形波的下沿触发单稳态产生的正脉冲与B道整形波相‘与’,当码盘正转时只有正向口脉冲输出,反之,只有逆向口脉冲输出。因此,增量编码器是根据输出脉冲源和脉冲计数来确定码盘的转动方向和相对角位移量。通常,若编码器有N个(码道)输出信号,其相位差为π/N,可计数脉冲为2N倍光栅数,现在N=2。电路的缺点是有时会产生误记脉冲造成误差,MC43A系列可获取编码器位置数据和温度数据。分体式编码器种类及型号

绝对值编码器在设备断电后再次上电时,能够检测出当前位置。通常绝对值编码器使用多个光传感器向控制器发送二进制代码。在需要更高精度和更大范围的应用中,多圈绝对值编码器检测单圈角位置的同时,通过记录圈数来实现检测更大范围的已知位置。它们具有对应于光发送器/接收器对的不同码道。对于单圈绝对值编码器,这些码道创建了一个二进制代码,可以检测编码器在一圈内的角位置。上海科姆特自动化控制技术有限公司提供专业技术咨询和各种解决方案、快速对接客户和产品供应商、系统集成商,以满足不同类型的客户需求。AI中心技术和机器人整体解决方案竭诚为“中国制造2025”做出贡献。中空编码器代理编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:电源切除后位置信息不会丢失。

汽车方向盘顺时针和逆时针旋转时,其旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其输出脉冲数为900个;实际使用的计数电路用3片74LS193组成,在系统上电初始化时,先对其进行复位(CLR信号),再将其初值设为800H,即2048(LD信号);如此,当方向盘顺时针旋转时,计数电路的输出范围为2048~2948,当方向盘逆时针旋转时,计数电路的输出范围为2048~1148;计数电路的数据输出D0~D11送至数据处理电路。实际使用时,方向盘频繁地进行顺时针和逆时针转动,由于存在量化误差,工作较长一段时间后,方向盘回中时计数电路输出可能不是2048,而是有几个字的偏差;
上海科姆特自动化控制技术有限公司提供专业技术咨询和各种解决方案、快速对接客户和产品供应商、系统集成商,以满足不同类型的客户需求。AI中心技术和机器人整体解决方案竭诚为“中国制造2025”做出贡献。通常绝对值编码器使用多个光传感器向控制器发送二进制代码。对于单圈绝对值编码器,这些码道创建了一个二进制代码,可以检测编码器在一圈内的角位置。在需要更高精度和更大范围的应用中,多圈绝对值编码器检测单圈角位置的同时,通过记录圈数来实现检测更大范围的已知位置。它们具有对应于光发送器/接收器对的不同码道。绝对值编码器在设备断电后再次上电时,能够检测出当前位置。电池寿命可计算。·编码器内部始终在比较来自两个不同传感器的数据。
上海科姆特自动化控制技术有限公司提供专业技术咨询和各种解决方案、快速对接客户和产品供应商、系统集成商,以满足不同类型的客户需求。AI中心技术和机器人整体解决方案竭诚为“中国制造2025”做出贡献。编码器利用光栅衍射原理实现位移-数字变换,通过光电转换,将输出轴上的机械几何位移量转换成脉冲数字量的传感器。常见的光学式编码器由光栅盘,发光元件和光敏元件组成。光栅实际上是一个刻有规则透光和不透光线条的圆盘,光敏元件接收的光通量随透光线条同步变化,光敏元件输出波形经整形后,变为脉冲信号。根据脉冲的变化,可以精确测量设备位移量。从1992年起,尼康以“开发机器人制造商想要的编码器”为方针,不断积累技术并提高市场的可靠性。河北分体式编码器有几种型号
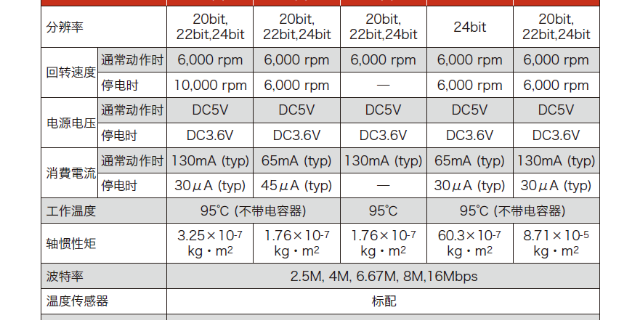
断电时电池的消费电流极小。即使在马达轴运转的情况下,电池的消费电流也保持一定。分体式编码器种类及型号
只要把握尼康编码器的性能,那么尼康编码器自然能够被大家应用很久,正常使用还可以延长它的使用寿命。尼康编码器不仅在精细度方面非常好,而且还拥有不错的耐高温性产品,是否拥有耐高温性同样重要,如果没有这方面的性能就有可能会产生相应损坏,使用价值也会受到影响。另外这款产品抗击打能力较强,外壳十分坚硬,同样能够被长时间使用,是一款非常常见的产品。尼康编码器自从出现之后,便令很多人满意,在选购的时候同样有很多值得注意的地方,分体式编码器种类及型号