
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
此时所述机身再所述顶压弹簧作用下上移。进一步地,所述传动装置包括所述传动腔顶壁内设置的齿轮腔,所述齿轮腔与所述传动腔之间转动设置有第二转轴,所述第二转轴顶部末端转动设置于所述转动腔顶壁内,所述第二转轴内设置有上下贯通的贯通孔,所述传动腔内的所述第二转轴底部末端固定设置有与所述螺纹套外表面固定设置的diyi锥齿轮啮合的第二锥齿轮,所述齿轮腔内的所述第二转轴外表面固定设置有diyi齿轮,所述齿轮腔内可转动的设置有与所述齿轮腔底壁内固定设置的第二电机动力连接的第三转轴,所述齿轮腔内的所述第三转轴外表面固定设置有与所述diyi齿轮啮合的第二齿轮,所述第三转轴顶部末端伸入所述转动腔顶壁内开口向下设置的凹槽内,所述凹槽内的所述第三转轴末端固定设置有与所述凹槽端壁上固定设置的内齿圈啮合的第三齿轮。进一步地,所述联动装置包括所述机身顶壁内设置的转动腔,前后两个所述diyi转轴均贯穿所述转动腔且所述转动腔内的所述diyi转轴外表面固定设置有限位块,所述转动腔内可转动的设置有与前后两个所述蜗轮均啮合的蜗杆,所述转动腔顶壁内可转动的设置有与所述手动轮固定连接的第四转轴。实时检测汽车面漆的固化程度,确保涂层稳定可靠。南平偏折光学法汽车面漆检测设备供应商
汽车面漆检测设备
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。合肥工业质检汽车面漆检测设备供应商家汽车面漆检测设备具有智能化分析功能,方便用户快速了解涂层状况。
汽车面漆检测设备是用于汽车整车制造工厂的后道检测工序,主要用于检测汽车表面油漆的划痕、空洞、瑕疵、凸点等缺陷的检测,是汽车生产工序后质量的保障型设备。涂装管理近几年,部分有实力的涂装材料公司和涂装设备公司又推出了BOT服务模式,即汽车公司的涂装车间由涂装材料公司或涂装设备公司投资建设,并负责生产管理,根据汽车公司的整车生产计划进行涂装生产,供给汽车公司的是合格的涂膜。汽车公司只需制定技术标准的和验收监督涂装产品质量。这将成为涂装管理的一大发展趋势。我国汽车涂装技术与国际水平的差距在不断缩小,但发展仍不均衡,就涂装质量的保证而言,几大轿车生产企业已经达到国际水平,但综合比较仍有10年左右的差距,主要体现在清洁生产技术方面;就汽车涂装生产关键装备技术而言,我国可能在今后相当长的时间内主要依赖进口。预计我国在未来10~15年内,汽车涂装水平将与国际接轨,加快节省资源和环保技术的应用。
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不仅可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。这款检测设备能够准确评估汽车面漆的耐磨性。

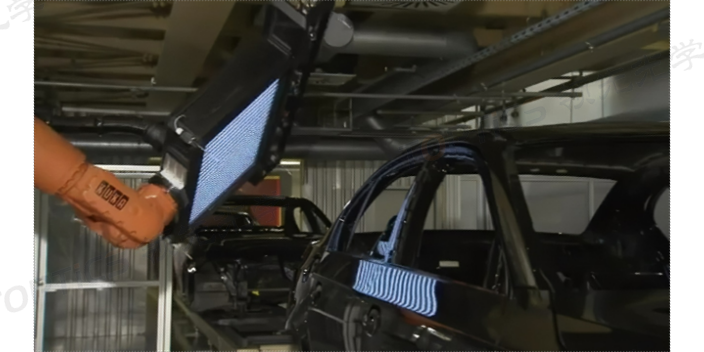
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。汽车面漆检测设备采用智能化操作界面,方便用户快速上手。南平偏折光学法汽车面漆检测设备供应商
这款检测设备能够准确评估汽车面漆的耐候性,延长涂层使用寿命。南平偏折光学法汽车面漆检测设备供应商
据Gartner发布的报告显示,由于芯片短缺以及汽车电气化、自动驾驶等趋势,全球前*大汽车制造商中的半数将自行设计芯片,借以掌控产品路线图和供应链。
Gartner研究副总裁Gaurav Gupta认为,汽车半导体供应链很复杂。在大多数情况下,芯片制造商只是汽车制造商的三级或四级供应商,通常需要一段时间才能适应汽车市场的需求变化,这使得汽车制造商增加了对半导体供应链的控制欲望。
特斯拉是**自研自动驾驶芯片的车企,对于特斯拉的做法,业内人士指出:“他们选择自研芯片,是因为当时英伟达这些厂商没有能满足他们需求的芯片,加上特斯拉销量起来后,有足够资金自己研发并找供应链支持。从结果来看,他们这种做法被市场认可,所以大家开始往这个方向尝试。”
在自研芯片方面,不同车企的重点和布局也有所不同。特斯拉、小鹏、蔚来等这些一直在用自研算法的车企,自研高算力芯片。前述人士指出:“车企喜欢强调全栈自研,但通用芯片无法发挥出自研算法的优势,所以有实力的厂商选择定制化自己的芯片来匹配自研算法。”从这个角度来说,车企自研高算力芯片前提之一是本身在自动驾驶软件及算法有足够强的能力。
南平偏折光学法汽车面漆检测设备供应商

所述花键孔25内可滑动的设置有末端伸入所述锁定槽21内的花键杆23,所述花键杆23与所述花键孔25端壁间设置有复位弹簧26,当向下按压所述机身10时,所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,所述机身10上方设置有可转动的手动轮27,将所述手动轮27转动半周通过所述机身10顶壁内设置的联动装置98可以带动所述花键杆23转动半周,此时所述机身10再所述顶压弹簧12作用下上移。有益地,所述传动装置99包括所述传动腔42顶壁内设置的齿轮腔50,有效减少了人工目视检查带来的主观误差和疲劳累积,大幅度提升了检验的效率和可靠性。宁德工业质检汽车面漆检测设备哪家好汽...
- 开封汽车面漆检测设备价格 2025-01-07
- 平顶山非隧道式汽车面漆检测设备源头厂家 2025-01-07
- 本溪高精度汽车面漆检测设备源头厂家 2025-01-07
- 锦州代替人工汽车面漆检测设备价格 2025-01-07
- 漳州代替人工汽车面漆检测设备品牌 2025-01-07
- 淮南偏折光学法汽车面漆检测设备供应商家 2025-01-07
- 合肥代替人工汽车面漆检测设备供应商 2025-01-07
- 安徽工业质检汽车面漆检测设备哪家好 2025-01-06
- 福州非隧道式汽车面漆检测设备生产厂家 2025-01-06
- 丹东非隧道式汽车面漆检测设备推荐 2025-01-06



- 蚌埠快速汽车面漆检测设备生产厂家 2025-01-06
- 平顶山工业质检汽车面漆检测设备供应商 2025-01-05
- 龙岩非隧道式汽车面漆检测设备生产厂家 2025-01-05
- 太原快速汽车面漆检测设备品牌 2025-01-05
- 安徽偏折光学法汽车面漆检测设备哪家好 2025-01-05
- 莆田光学方法汽车面漆检测设备品牌 2025-01-05





- 连云港智能配镜机器人推荐 01-27
- 配镜机器人生产厂家 01-27
- 代替人工配镜机器人 01-27
- 上海配镜机器人公司 01-27
- 北京线上配镜机器人推荐 01-27
- 南京全自动配镜机器人推荐厂家 01-27
- 淮安光学算法配镜机器人 01-26
- 盐城智能配镜机器人生产厂家 01-26
- 扬州光学算法配镜机器人 01-26
- 北京远程配镜机器人公司 01-26