- 品牌
- 牛眼智能,Bullseye
- 型号
- 齐全
托盘四向车立体仓库的特性在于:1.柔性适应仓库吞吐量变化。可以通过灵活增减穿梭车数量,实现大流量与低流量作业波动下的灵活配置。2.快速应对设备故障。在其他两类解决方案中,当堆垛机或母车发生故障时,整个巷道作业都会被影响;而在托盘四向车密集存储系统中,当任意穿梭车发生故障时,都可以马上通过更换穿梭车来解决。3.成本更优。在增加订单量、不增加库存量的情况下,托盘四向车系统只需增加穿梭车数量即可,总体成本更低。随着四向穿梭车的普及,未来仓储物流行业将朝着更加智能化、环保的方向发展。天津超薄型四向穿梭车
四向穿梭车特点:1、货架可柔性化设计,以适应不同建筑物的不规则区域及跃层输送,并可建立不同建筑物之间的链接系统;2、由于穿梭车的工作空间和存储空间结合在一起,因此可以更有效地利用空间。四向穿梭车的设计不只提高了仓储空间的利用率,还优化了货物输送和存储的功能。上述内容就是小编所给大伙分享的四向穿梭车优点了,当我们了解这些时就可以更好的使用了,当然了穿梭车是搭配立库使用的,一般我们只需要发需求给我们,我们可以给大伙出合理的方案,欢迎大伙咨询。杭州牛眼四向穿梭车厂商与传统搬运设备相比,四向穿梭车具备无人驾驶、智能导航等功能,降低了人工操作的风险。
智能托盘四向穿梭车在垂直交叉轨道上切换方向,完成货物的水平装卸,有单作业和复合作业两种模式。在单一运行模式下,四向车一个周期只完成一个出(入)库任务;在复合作业模式下,设备在一个周期内完成入库和出库两个任务。智能托盘四向穿梭车密仓可实现全自动、智能化、无人化作业,较传统立体仓库存储能力提升20%~50%。随着各项技术指标的成熟,托盘四向穿梭车在国内外密集图书馆得到了普遍应用。对于托盘式四向穿梭车机器人,主要用于托盘的存取作业,它与AS/RS相比较,其优势是存储更加灵活,柔性更高,可以适应任何复杂的仓库结构,可以根据入出库的需求增加或减少小车的数量,可以实现高密集存储等。
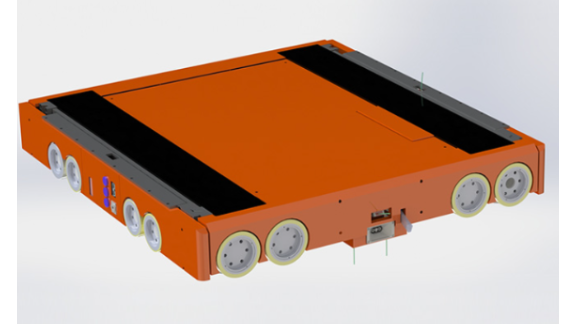
四向车的实用性:四向车的高度小,小车轨迹上表面离地面距离只有300mm,可高效率的使用仓库的空间。四向车的可靠性:小车中的所有设备产品和控制元件都使用非常可靠老练的产品配件。控制系统采用简练、安稳的控制元件,使用特定的算法,结合小车自身简练扎实的机械结构,到达小车稳、准、快的可靠运转目的。四向穿梭车智能仓储的优势: 1、四向穿梭车可降低成本投入,提高存储空间利用率;2、四向穿梭车可以四向行驶,可到达仓库任意位置;具有爬坡以及自动调平的能力;3、四向穿梭车电量监测,自动充电(多级阈值控制)四向穿梭车具有高度灵活性,可以根据不同的仓库布局进行定制设计。
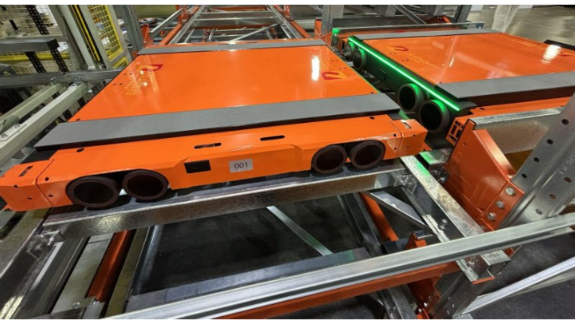
智能托盘四向穿梭车(以下简称四向车)作为集约化仓储的重要运输设备,是一种具有自动循轨倒车和变道功能的智能运输设备。在电控系统的控制下,通过编码器、RFID、光电传感器等数字技术对各输入输出站进行精确定位,并配置智能调度系统,接收物料后自动穿梭运输,从而实现精确、高效的作业模式,为企业的物流存储系统提供新的物流解决方案。智能托盘四向穿梭车是独一可以做到在交叉轨道上沿纵向及横向轨道任意方向行驶,具备爬坡和自动调平功能,并且由于可以双向行驶,使得系统配置更标准化。其主要功能是四向穿梭车主要用于仓库托盘货物的自动搬运和输送,自动存取货、自动换道换层、智能调平及自动爬坡,直接到达仓库的任一位置。既可以在货架轨道,也可以在地面行使,充分体现其自动性和柔性,是集自动搬运、无人引导,智能控制等多功能于一体的智能搬运设备。四向穿梭车适用于仓库、工厂、超市等场所的货物搬运和堆垛作业。苏州非标版四向穿梭车厂家直销
四向穿梭车具有良好的可扩展性,可以根据仓库需求进行系统升级或扩容。天津超薄型四向穿梭车
四向穿梭车的先进技术:传感器技术,传感器技术是四向穿梭车实现安全、稳定运行的关键。穿梭车上配备了多种传感器,如距离传感器、速度传感器、加速度传感器等,这些传感器能够实时感知周围的环境和穿梭车的状态,为控制系统提供准确的数据支持。通过这些数据,控制系统可以实时调整穿梭车的运行状态,确保货物的安全运输。综上所述,四向穿梭车采用了导航与定位技术、自动控制技术、传感器技术和通信技术等多项先进技术,这些技术的融合使得穿梭车具备了高效、智能和灵活的特性,为现代仓储管理带来了革新性的变革。天津超薄型四向穿梭车

在实际应用中四向穿梭车仍面临多重挑战。在产品可靠性方面,目前主流设备的平均无故障时间(MTBF)在500-800小时,远低于客户期望的2000小时标准,特别是转向机构和供电滑触部位的故障率居高不下,直接影响系统连续作业能力。系统集成度不足是另一突出短板,约60%的供应商仍停留在单机销售模式,其调度系统往往基于固定路径算法,无法实现四向穿梭车特有的动态路径规划优势,导致设备利用率普遍低于65%。在整体解决方案层面,缺乏从仓储布局、设备选型到系统集成的全流程设计能力,常见问题包括未预留检修通道、充电点位设置不合理等基础性缺陷。其中关键的制约因素在于调度软件的智能化程度不足,现有系统多采用静态任务分...
- 智能四向穿梭车批发价格 2025-07-15
- 南京牛眼智能四向穿梭车行价 2025-07-15
- 托盘四向穿梭车定制价格 2025-07-14
- 杭州仓储四向穿梭车生产厂家 2025-07-14
- 杭州重型四向穿梭车厂家直销 2025-07-14
- 南京智能四向穿梭车市价 2025-07-14
- 窄型四向穿梭车价位 2025-07-14
- 杭州超窄型四向穿梭车市场价格 2025-07-14
- 上海仓储四向穿梭车批发价格 2025-07-14
- 无锡牛眼智能四向穿梭车市价 2025-07-14




- 牛眼四向穿梭车厂商 2025-07-12
- 上海智能四向穿梭车供应商 2025-07-12
- 杭州全自动四向穿梭车市价 2025-07-11
- 无锡牛眼智能四向穿梭车参考价 2025-07-11
- 宁波箱式四向穿梭车生产厂家 2025-07-11
- 南京堆垛机四向穿梭车参考价 2025-07-11





- 物流用提升机怎么样 07-15
- 智能四向穿梭车批发价格 07-15
- 杭州提升机定制 07-15
- 上海往复式提升机哪家好 07-15
- 苏州高速提升机厂商 07-15
- 南京牛眼智能四向穿梭车行价 07-15
- 托盘四向穿梭车定制价格 07-14
- 南京不锈钢提升机参考价 07-14
- 杭州仓储四向穿梭车生产厂家 07-14
- 无锡智能提升机厂家直销 07-14