-
 黄山本地柔性打磨03.06
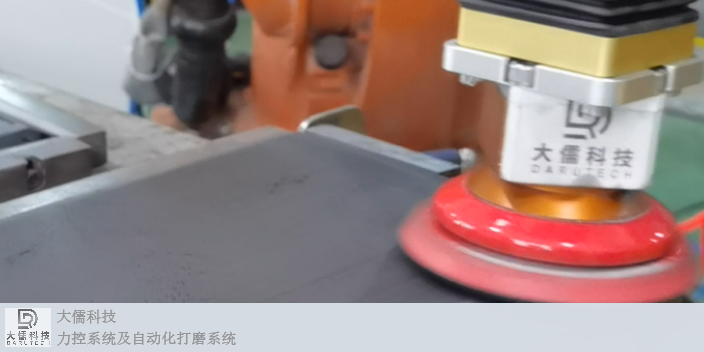
黄山本地柔性打磨03.06打磨力的数字量化及实时控制,保证了打磨力的均衡柔性输出,高精度力控制,不但可以解决打磨行业自动化实现难的痛点,又保证了批量工件的打磨效果的均匀性和一致性;打磨过程中的高频率振动对打磨机、机械手连接部分...

-
 **柔性打磨欢迎咨询03.05
**柔性打磨欢迎咨询03.05因需尽量准确地确定机器人运转路径,编程工作繁复而耗时。传统技术尽管在学说上可获得恒定的研磨抛光质量,然而实情并不尽如人意,加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结...
-
 深圳力控系统操作简单03.05
深圳力控系统操作简单03.05焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿...
-
 广州力控系统机构03.05
广州力控系统机构03.05客户终端采用气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要...
-
 高质量力控系统产品使用误区03.04
高质量力控系统产品使用误区03.04铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导...
-
 官方力控系统企业03.04
官方力控系统企业03.04随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨...
-
 力补偿力控系统供应03.04
力补偿力控系统供应03.04在使用DFC智能力控系统力控系统打磨时,操作者首先需要根据制定的打磨方案设置相关的参数,例如打磨力度、打磨机转速、加工深度及机器人路径等。然后启动设备,系统会自动进行加工过程,同时实时获取并分析数据,...
-
 厦门品质力控打磨装置03.03
厦门品质力控打磨装置03.03铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导...
-
 成都品质力控打磨厂家直供03.03
成都品质力控打磨厂家直供03.03客户终端采用气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,气动打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还...
-
 郑州官方力控打磨操作简单03.03
郑州官方力控打磨操作简单03.03随着社会的发展,越来越多家具和装修需要使用石材,而对于石材表面的平整要求也越来越高,需要对石材表面进行打磨抛光,实现平面光滑整洁,而现有的打磨操作一般需要工人使用打磨工具对石材表面一点点打磨抛光,这种...
-
 安徽直销力控打磨厂家直供03.02
安徽直销力控打磨厂家直供03.02智能力控打磨力控打磨采用自适应的接触力柔性控制方式,运用控制算法来驱动磨头运动,柔性工件易损自动补偿,利用激光传感器识别来料焊缝高度,实现打磨均匀、可控,安全性好,投资回报率快。解决问题:传统的人工打...
-
广州品质力控打磨欢迎选购03.02
加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的...